

Staff/Rossi
- Mauricio Longinos Garrido y Néstor Antonio Tolentino Medrano, de la Maestría en Ingeniería Electrónica, desarrollan este proyecto
Los robots han adquirido relevancia como mecanismo para auxiliar a las personas en situaciones difíciles o peligrosas; sin embargo, es importante que estos puedan interactuar y retroalimentarse del entorno, además de cooperar con otros para cumplir las tareas asignadas; por ejemplo, búsqueda y rescate, situaciones de contingencia, implementación y despliegue de redes de comunicación, entre otras. Ante esto, estudiantes de la Facultad de Ciencias de la Electrónica (FCE) diseñan un control basado en eventos para un sistema multi-agentes, capaz de realizar formaciones y seguir trayectorias en ambientes no controlados.
Los ingenieros Mauricio Longinos Garrido y Néstor Antonio Tolentino Medrano, estudiantes de la Maestría en Ingeniería Electrónica, desarrollan este sistema bajo la tutela del doctor Fermi Guerrero Castellanos y sus respectivos asesores de tesis, la doctora Josefina Castañeda Camacho y el maestro Ricardo Álvarez González. La idea es que los robots puedan desplazarse en diferentes entornos y comunicarse entre ellos para realizar acuerdos sobre sus posiciones, así como de objetos que puedan interferir con sus trayectorias. Todo esto procurando tener un consumo energético eficiente.
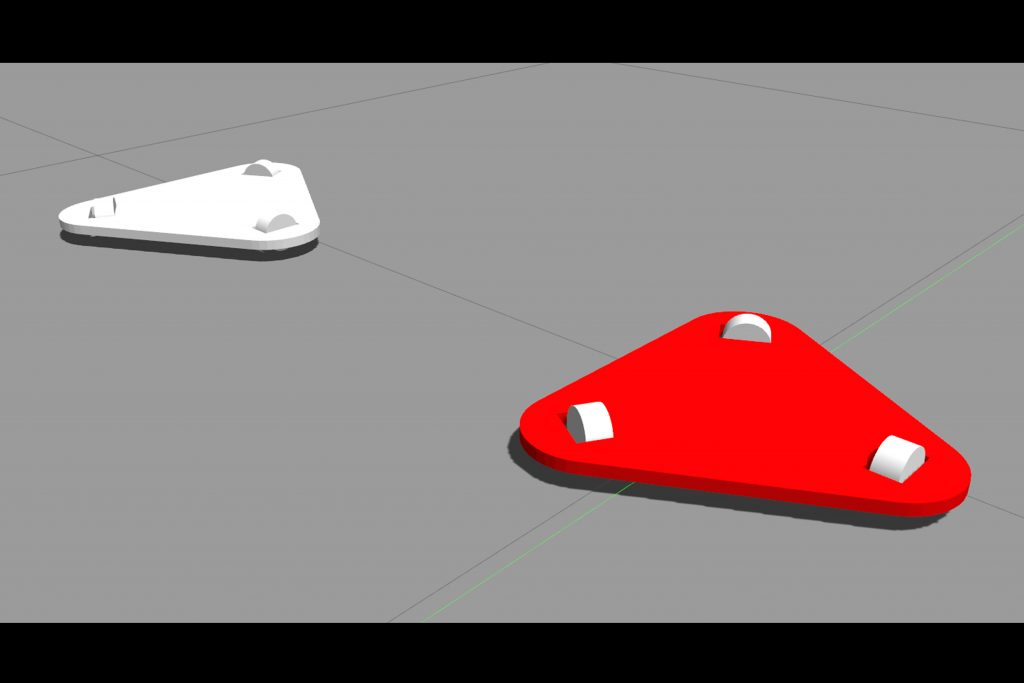
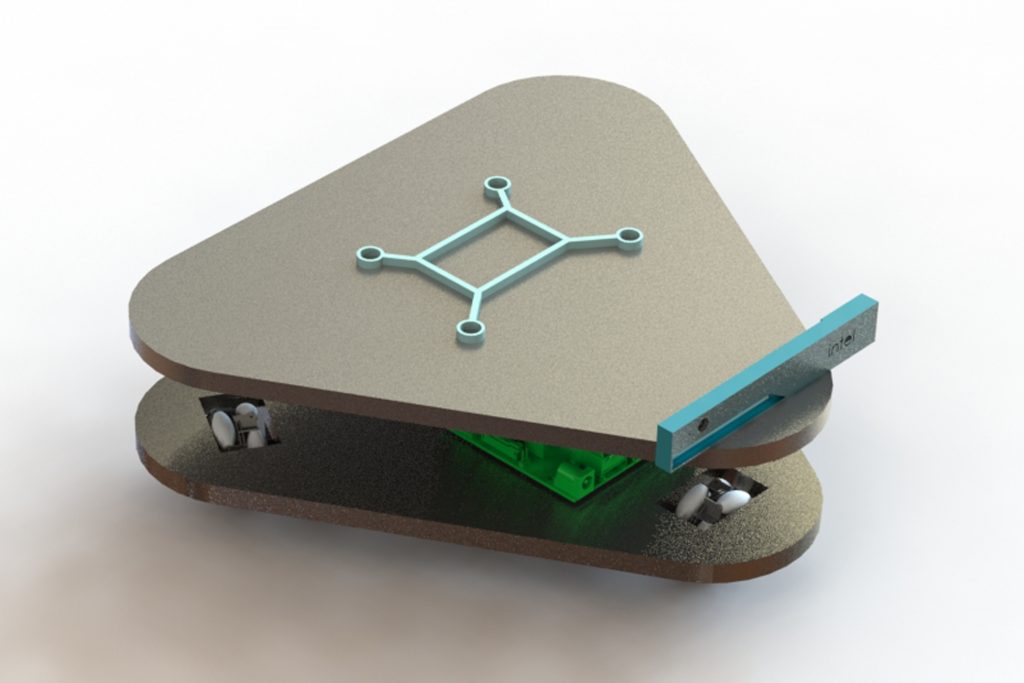
El proyecto consiste en un conjunto de vehículos terrestres omnidireccionales (equipados con una tarjeta de cómputo empotrado “Raspberry Pi 3”), denominados agentes y que representan un nodo dentro de la red del sistema. Cada nodo cuenta con la capacidad de comunicarse con sus vecinos por medio de una de las herramientas principales que se utilizan para el proyecto, el meta-sistema operativo ROS, el cual es una capa de software en donde se ejecutan los algoritmos y permite una mejor integración de estos.
“Cada agente está integrado por un algoritmo que permite realizar consenso para hacer formaciones y ejecutar seguimientos de trayectorias a la vez de que se evitan colisiones contra obstáculos y otros agentes mediante funciones potenciales atractivas/repulsivas. El sistema de control y de comunicaciones está basado en eventos, lo que permite tener un mejor rendimiento en el uso de recursos computacionales, energéticos y de comunicaciones. Los nodos forman redes Ad-Hoc que permiten tener comunicación con otros vehículos mediante técnicas de enrutamiento, lo que permite formar redes inteligentes, escalables y reconfigurables”, explicaron.
Señalaron que para lograr que los agentes se desplacen por ambientes no controlados es necesario que estos logren identificar el entorno y se ubiquen dentro del mismo, a este proceso se le denomina SLAM, por su acrónimo en inglés (Simultaneous Localization and Mapping)
“Existen diferentes aproximaciones para la solución de dicho problema y hemos seleccionado una en la que se implementan cámaras de profundidad, las cuales por medio de cámaras infrarrojas estereoscópicas logran calcular la distancia a los objetos dentro de la imagen, de este modo se pretende reducir los efectos de cambios de iluminación en las imágenes comunes (RGB), ya que en el procesamiento de imágenes estos cambios pueden representar grandes modificaciones en los resultados del procesamiento”.
También añadieron un sistema de visión llamado OptiTrack, el cual consiste en un arreglo de cámaras infrarrojas distribuidas a lo largo y ancho de un espacio al que se denomina arena; estas cámaras calculan la posición de los objetos por medio de marcadores dispuestos tanto sobre los agentes, como sobre los obstáculos, de modo que el sistema puede adquirir las posiciones de los diferentes elementos, esto con el fin de agilizar el desarrollo y no depender por completo del sistema de visión de abordo (SLAM) que se implementa de manera paralela. “Es en este espacio en donde realizamos las pruebas de los diferentes sistemas e implementaciones”.
Hasta el momento los estudiantes han logrado resultados satisfactorios de dos agentes físicos, capaces de realizar seguimiento de trayectorias y al mismo tiempo evitar colisiones entre ellos y con obstáculos conocidos; por otro lado, debido a la falta de acceso a laboratorios por el confinamiento de la pandemia fue necesario migrar estos avances al simulador Gazebo, el cual es un popular entorno de desarrollo para robots móviles, en donde se han logrado replicar los resultados; al mismo tiempo se han realizado implementaciones de diferentes algoritmos de SLAM de manera independiente.
Los alumnos mencionaron que actualmente se encuentran dentro de un ciclo continuo de desarrollo del proyecto, así como en la implementación y evaluación de los diferentes subsistemas que lo integran, apoyados en la metodología de los diagramas en V, los cuales permiten un desarrollo independiente de estos. De igual forma, comentaron que ya se cuenta con un artículo próximo a presentarse en la sexta entrega del EBCCSP (Event-Based Control, Communication and Signal Processing), congreso que tendrá lugar en Polonia.
Entre los siguientes pasos de esta investigación se encuentra finalizar la integración de los diferentes subsistemas, como el de visión, el de comunicaciones y enrutamiento, a la vez, incrementar el número de agentes para posteriormente realizar las debidas pruebas, tanto en simulador como en ambientes físicos reales.
You may also like
-
¡No te quedes en la cancha! “Haz ECO a tu Corazón”
-
Cruz Roja de Huauchinango suspende emergencias por crisis económica
-
Dos muertos tras choque de transporte público en Acatzingo
-
La comezón en perros genera 3 de cada 10 consultas veterinarias
-
Muere Noelia Castillo, mujer que buscó la eutanasia en España durante casi 3 años